In the second part of the launching ceremony the time has come to demonstrate where we are at. We will show how the shiplet can swim, semi-submerge and drive calmly being stabilized by the level control system (LCS). The first driving mode is the so called "harbour mode": the ballast tanks are fully inflated with air to create maximum buoyancy while the dynamic level control system is turned off. In harbour mode the central hull is slightly above the water surface.
The shiplet is swimming at the surface in harbour mode with fully inflated ballast tanks right after its launching at the "Modellboothafen" in Berlin's Britzer Garten on September 13th, 2025. (Image source: Volker Grassmuck)Shiplet launching and test driving in harbour mode on September 13th, 2025. (Video source: Katrin Lang)The shiplet at its maiden voyage at the launching ceremony on September 13th, 2025. (Foto: Michael Neuner)Captain Dirk conning the shiplet via remote control at the launching ceremony on September 13th, 2025. (Foto: Michael Neuner)
When driving the shiplet can be submerged. The aspired height is preset via remote control and then conducted by the level control system. When moving in submerged state the experimental prototype is floating calmly through the water like a SWATH. The balast tanks are partly fludded so that they generate just enough buoyancy to keep the shiplet balanced at the desired level. They do also compensate perseverative inclination, while the flapping fins are continously leveling the experimental prototype, which can only work while the driving speed creates sufficient hydrodynamic forces. The perfect balance is the result of implementing a PID controller.
The shiplet is submerging at its official maiden voyage on September 13th, 2025. (Foto: Michael Neuner)The shiplet is driving submerged at its official maiden voyage on September 13th, 2025. (Foto: Michael Neuner)The shiplet is driving to being semi-submerged at its official maiden voyage on September 13th, 2025. (Foto: Michael Neuner)Submerging shiplet at its official maiden drive on September 13th, 2025. (Video source: Felix Mühlbauer)
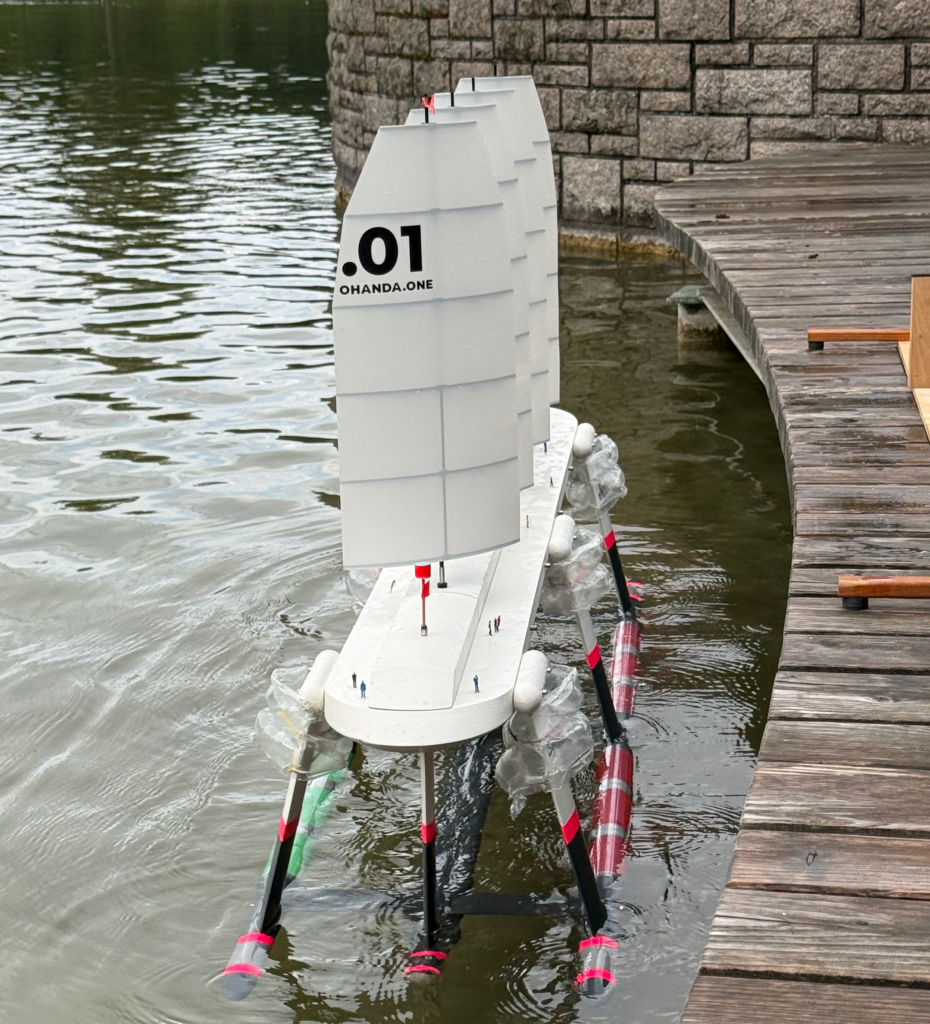
Besides the semi-submerged hull, the second main goal of the Ohanda One project is to combine the SWATH based design with a wind propulsion system. For a first trial we decided to use sviveling static sails inspired by the DynaRig. Since with these sails we are hitting the limits of our first version of an experimental prototype - especially when not driving - we add swimmies to the shiplet before setting sails.
Dirk and Jürgen fitting swimmies to the shiplet to prepare it for its official maiden voyage with sails at the shiplet launching on September 13th, 2025. (Foto: Volker Grassmuck)The shiplet equipped with swimmies and Jessica's colorful fearless scale model test crew on the rain wetted deck ready to sail at its maiden voyage on September 13th, 2025. (Foto: Volker Grassmuck)Close-up view of Jessica's colorful fearless scale model test crew on the rain wetted deck ready to sail at the shiplet's maiden voyage on September 13th, 2025. (Foto: Volker Grassmuck)Jürgen and Dirk launching the shiplet with sails on September 13th, 2025. (Foto: Volker Grassmuck)Shiplet swimming in harbour mode with sails at launching ceremony on September 13th, 2025. (Image source: Volker Grassmuck)Shiplet launching with sails on September 13th, 2025. (Video source: Thomas Stachowitz)Shiplet submerging with sails at its official maiden voyage on September 13th, 2025. (Foto: Michael Neuner)Submerged shiplet at its official maiden voyage with sails on September 13th, 2025. (Image source: Michael Neuner)Shiplet maiden voyage with sails on September 13th, 2025. (Video source: Kai Laborenz)Shiplet maiden voyage with sails on September 13th, 2025. (Video source: Kai Laborenz)
While the experimental shiplet prototype is perfectly balanced when driving, it is another story to suddenly stop it, before re-entering the harbour mode. In that case, it will just tilt! /o\
Demonstration of tilting shiplet with sails at the offical shiplet launching on September 13th, 2025. (Video source: Silke Meyer)
But the good news is, that the level control system is working so well, that even from a tilted position the shiplet can easily straighten itself up again just by speeding up.
Demonstration of the shiplet straightening itself up from tilted postion at the official launching ceremony on September 13th, 2025. (Video source: Silke Meyer)
To generally avoid the tilting and improve the shiplet's stability - besides adding more static buoyancy - it would be good to revise the design by broadening its shape placing the sideward balast tanks in farther distance from the center hull. But that might just be another story towards the utopian zero emission ship Ohanda One ...
Postcard of the utopian zero emission ship Ohanda One handed out at the official launching ceremony of the experimental 1:100 scale model prototype - aka the shiplet - on September 13th, 2025. (Foto: Tammy Yu-Ting Chiang)












One thought on “The Shiplet Launching Ceremony (Part 2)”
Comments are closed.