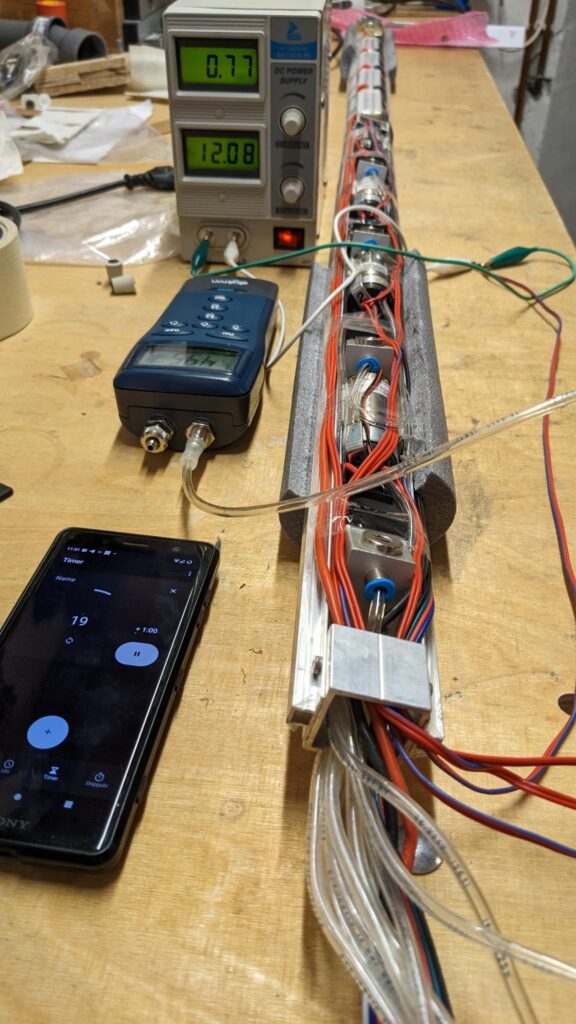
Our vision of a "sailing submarine" aka a sailing ship with a submerged hull requires a set of sensors and actuators to compensate the absence of stabilizing buoyancy, caused by minimizing the ship's volume near the water surface. While the design is supposed to reduce the response to sea state and minimizes the stalling bow wave, it turns the vessel into a very wobbly matter. At higher speed the vessel may benefit from stabilizing hydrodynamic forces, but the problem gets worse the slower it moves, especially since - as a sailing ship - it has to counteract the tilting dynamics inducted by the sails.
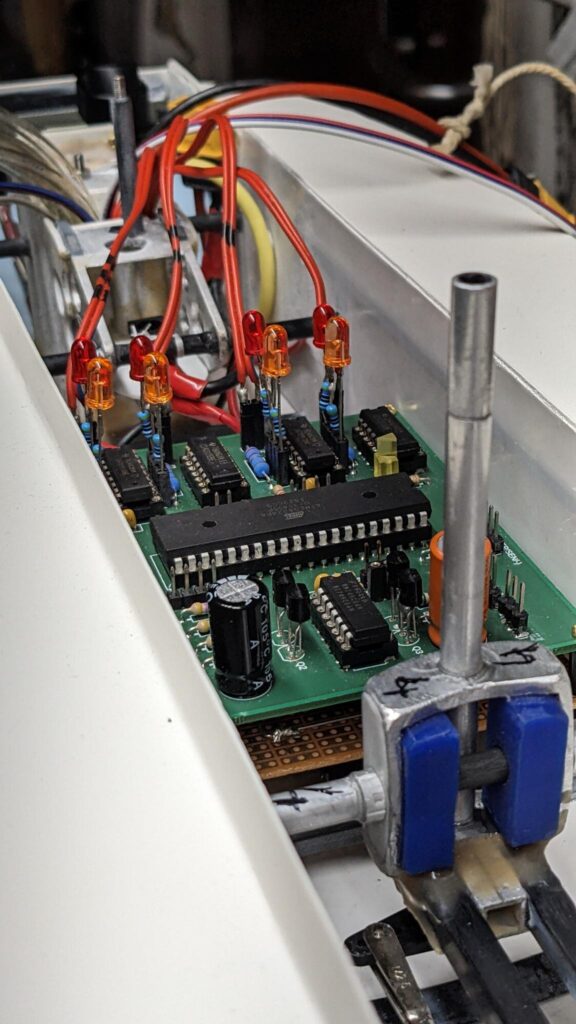
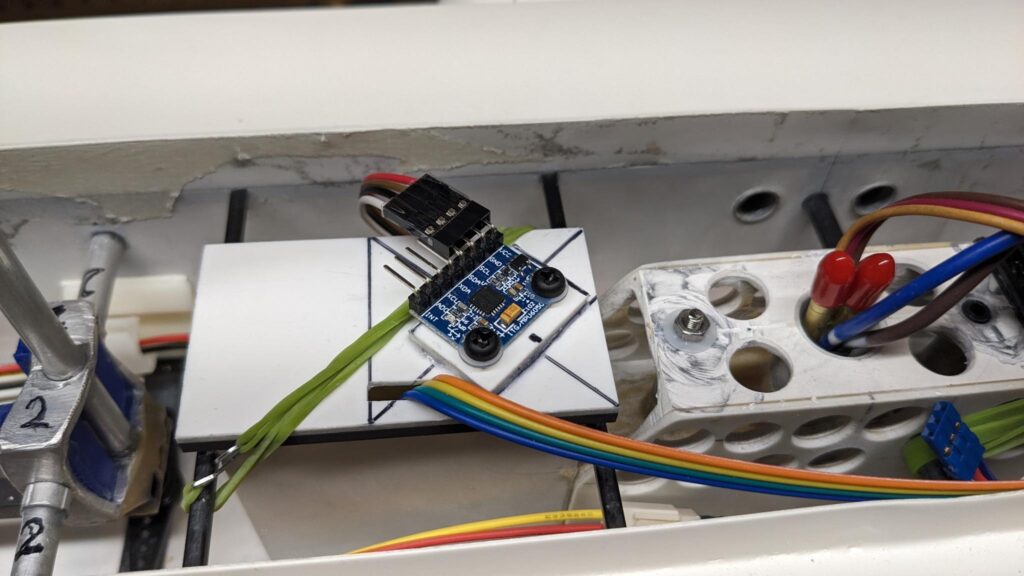
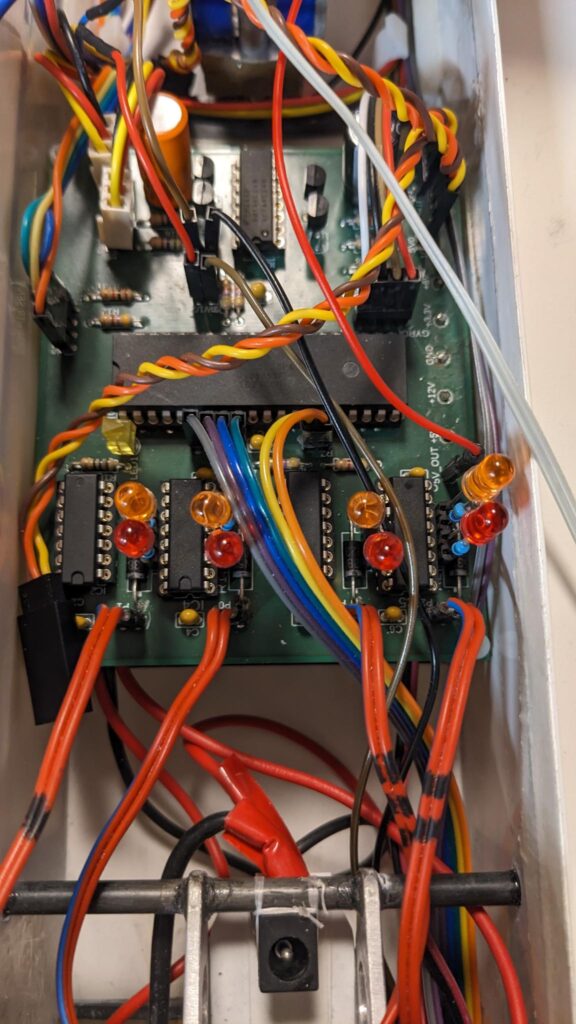
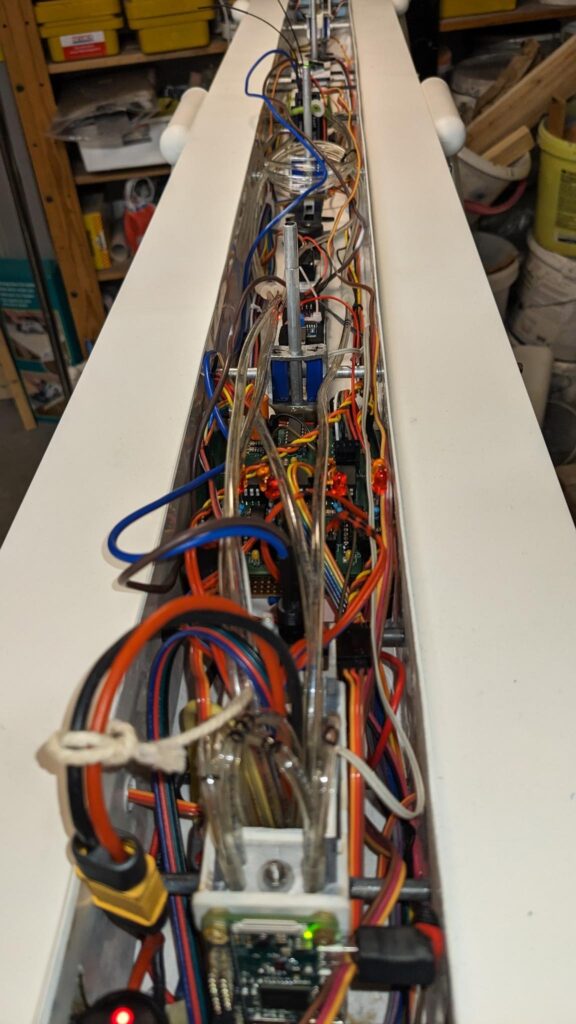
The aim of prototyping the shiplet is to find out whether we can manage to balance such a type of vessel when driving, by creating an effective cybernetic system. Though in the future we might want to add a whole bunch of different sensors, our minimal starting position is to use one ultrasonic proximity sensor (HC-SR04) to measure the shiplet's height above the water surface and a 6-axis motion tracking device (MPU-6050) that combines a 3-axis gyroscope and a 3-axis accelerometer. For signal processing and computing we use an ATMega324PA micro controller to actuate four digital servos (FS 180 BB MG HV DIGITAL) driving the four fin flaps, one at each corner, and the four air pumps and magnetic valves leveling the buoyancy created by the four balloons inside the side-gated tubular ballast tanks.
Code of Conduct
Besides the physical characteristics of the vessel design and the features of its actuators, the shiplet's "behaviour" is defined by the compiled c/c++ software code that is running on the micro controller. To flash the code we use avrdude running on a Raspberry Pi Zero W. This way we can rsync the code files over the air and flash new iterations on the fly. In retrospect to our first attempts the source code is much more mature already, but will certainly need a lot more of continuous improvements.
![]()
3 thoughts on “Cybernetic Marine Mechatronics”
Comments are closed.